Recently I’ve become interested in the R/C FPV scene and all things multirotor. My ongoing project for the last few months has been a DIY tricopter multirotor that I fly FPV with. The tricopter I’ve built has been through more iterations than any other project I’ve done and has been great fun! I’m always trying to improve it’s flight characteristics and range and most recently that has meant swapping out my Hitec 2.4Ghz controls for a UHF Long Range System.
Before doing this my controls was the limiting factor on range, the 1000mW video link I use can go much further, so that started the hunt for a low cost UHF LRS I could use with my existing Hitec Aurora 9 transmitter. The lowest cost LRS I could find was the Orange RX OpenLRS combo that’s sold on HobbyKing.com. For US$50 you can get a transmitter and receiver based on the OpenLRS hardware, but unfortunitly the transmitter module is not made for Hitec and is way too big to fit.
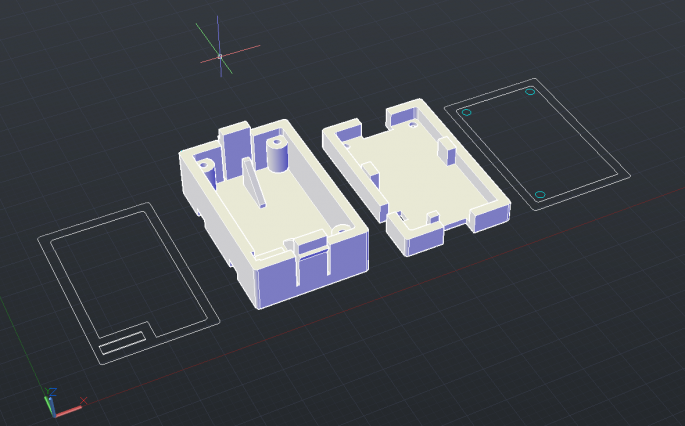
That’s where the AutoCAD model above, and a 3d printer comes in! I created a model of my existing 2.4Ghz transmitter module so that I could remotely connect it to the OrangeRX OpenLRS transmitter from HobbyKing. This new printed module snaps in to the back of the Aurora 9.

Here’s the module with the lid
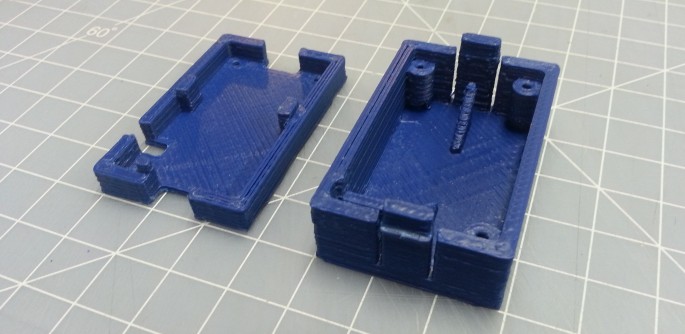
It fits a standard 5-pin female pin header to mate with the pins on the back of the Aurora

It fits great, and the tabs hold it in place securely

The module was printed with a Printrbot LC, and I’ve uploaded the design to thingiverse, so you’re welcome to download the model and print it yourself.
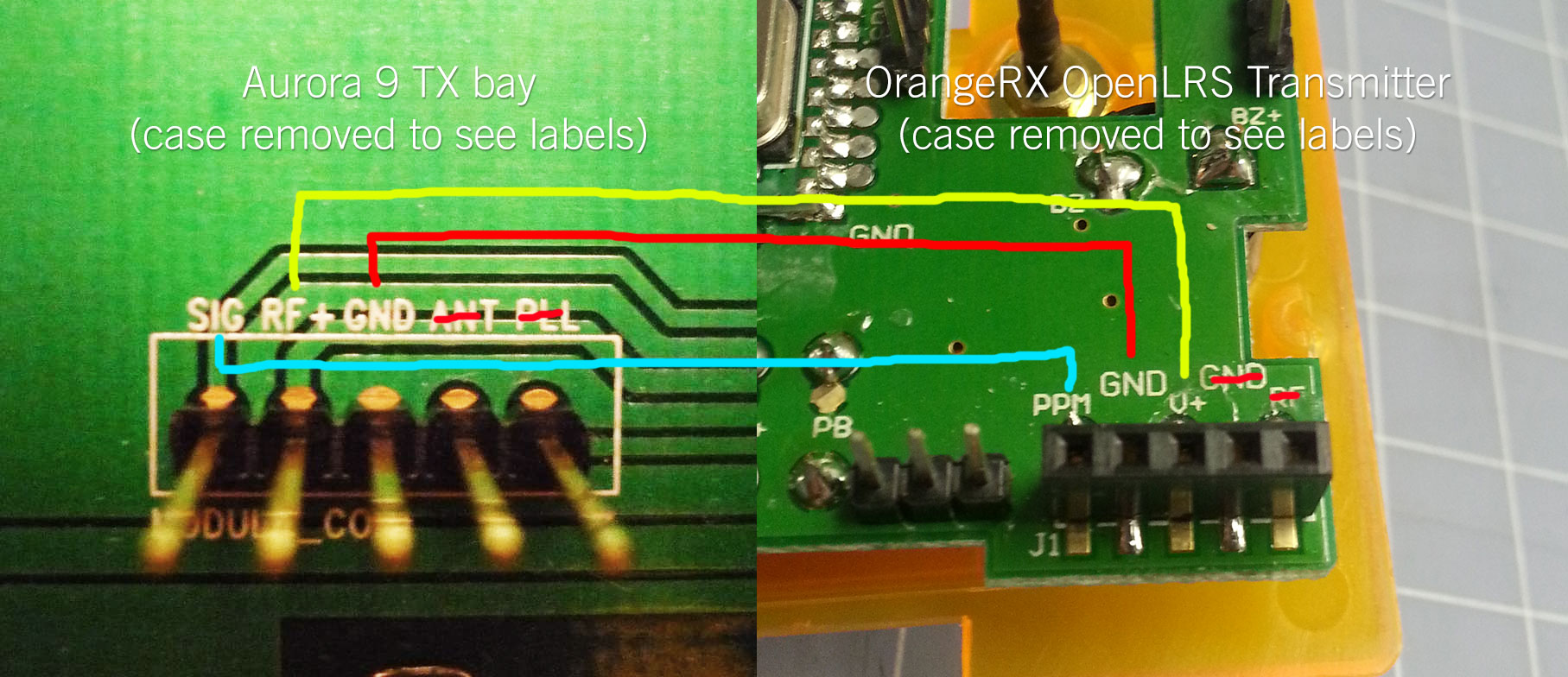
Here’s how the connections go, only three wires are needed. Your Aurora 9 will automatically switch to PPM mode during power-on when it sees that the normal 2.4Ghz module is not attached. (Thanks V from rcgroups.com!)
To get the OpenLRS modules running, I used the amazing openLRSng firmware by kh4 (which is based on the thUndeadMOD firmware which is based on the openLRS official firmware). This was the only set of firmware I was able to find that had actual instructions for programming and binding the units. You’ll have to have an ISP programmer device and the auduino IDE, but if you’ve got those covered it’s not too hard.
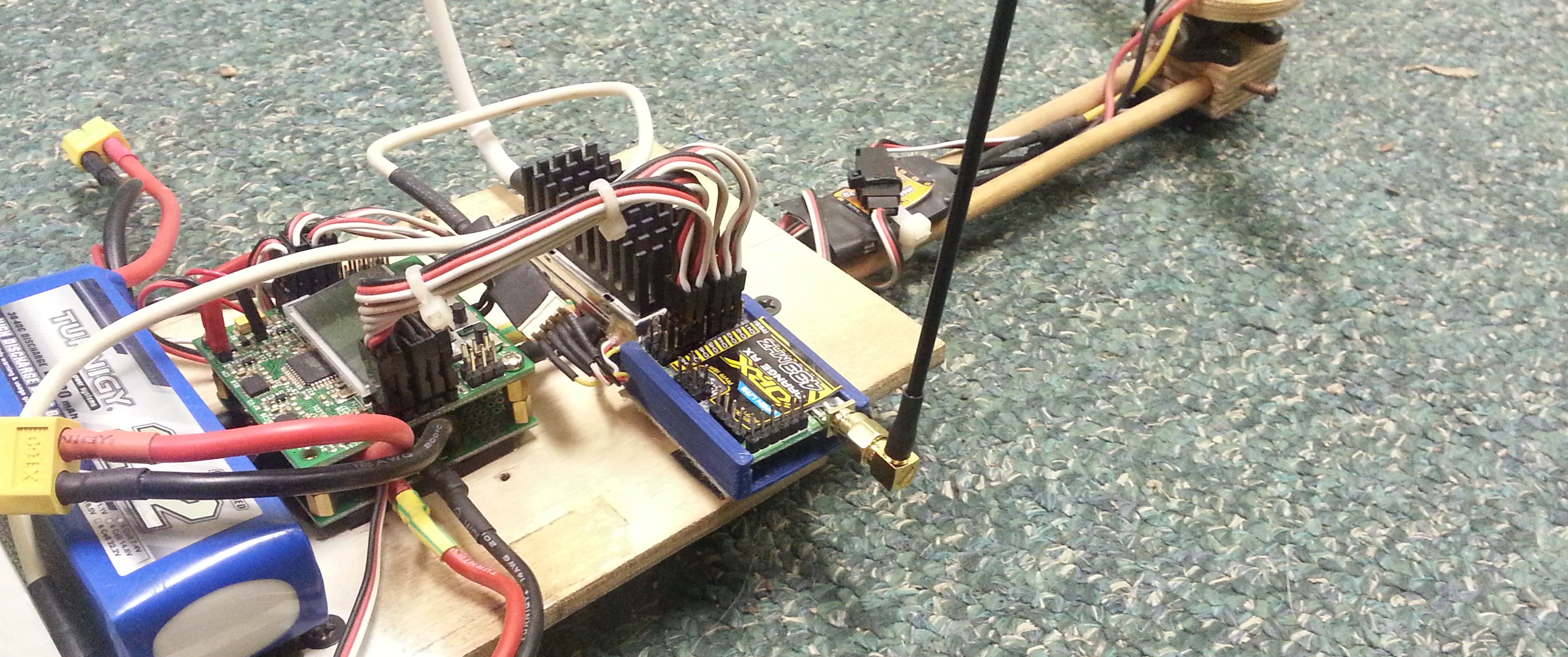
I haven’t done a range test yet, but I did a test flight and everything seems to be working great. Here’s a picture of the receiver mounted to my tricopter, (along with the 3d printed base I made to keep it attached)
I’ll be sure to post results of a range test when I get a chance! For now, here’s a list of all the resources in this article
- OrangeRX OpenLRS transmitter module (hobbyking.com)
- OrangeRX OpenLRS receiver module (hobbyking.com)
- 3d printable Aurora 9 module (thingiverse.com)
- 3d printable base for receiver module (thingiverse.com)
- OpenLRS firmare (github.com)